





Produktivitetsutvecklingen inom byggsektorn har stagnerat. Samtidigt råder brist på yrkesutbildad arbetskraft och för den personal som verkar på arbetsplatserna väntar tuffa ergonomiska belastningar. Att ta hjälp av robotar kan lösa många utmaningar. Ett exempel är en pumpslangsrobot som testats vid Lunds universitets Centrum för Byggrobotik.
– Det är en lösning för att i första läget kunna fjärrstyra pumpslangen vid betongpumpning. Vi jobbar också med att försöka få det här som ett mer autonomt system, säger Robert Larsson på Heidelberg Materials Cement Sverige, som är projektledare vid centret.
Sju av tio byggföretag rapporterar att man har brist på kvalificerad arbetskraft. Samtidigt innebär den demografiska utvecklingen att många pensionsavgångar av duktiga och erfarna yrkesarbetare kommer att inträffa under de närmaste åren. Den nuvarande arbetskraften slits också ut av tunga arbetsmoment samtidigt som det är svårt att rekrytera nya medarbetare till betongbranschen. Dessutom ger de nuvarande arbetsmomenten vid betonghantering en negativ miljöpåverkan.
– Alla de här områdena har byggrobotik potential att adressera. Kanske inte lösa helt ensamt naturligtvis, men i alla fall som en del av en lösning, säger Robert Larsson, som presenterade det senaste inom byggrobotik på Betongdagen.
Pumpslangrobot för säkrare arbetsmiljö
Den vanligaste metoden för att gjuta betong är med hjälp av en betongpump. I Sverige pumpas cirka 4 miljoner kubikmeter betong varje år. Betongpumpen och pumpmasten styrs av en pumpmaskinist med en handkontroll. Men själva pumpslangen styrs manuellt av en betongarbetare. Arbetet är förenat med risker då det är ett tungt arbete att flytta och rikta slangen.
– Eftersom betong är tungt behövs det ett högt tryck i systemet för att få upp betongen. Speciellt om vi pratar lite högre höjd. Det innebär naturligtvis en del faror med det, till exempel risken för så kallade luftskott. Man vill inte gärna vara i närheten av pumpslangen när det sker, säger Robert Larsson.

Luftskotten kan få slangen att röra sig okontrollerat med pisksnärtsliknande rörelser. De är mycket kraftfulla och kan orsaka allvarliga skador för den som håller pumpslangen eller andra som befinner sig i dess närhet.
– Vi kläckte därför en idé om att ta fram en lösning för att kunna fjärrstyra pumpslangen. Vi jobbar också med att försöka få det här som en mer autonomt system.
Visionen är att robotassisterade betongpumpslangar i framtiden ska bli ett standardverktyg vid olika typer av betonggjutningar, vilket skulle höja säkerheten och förbättra arbetsmiljön vid byggnation av både hus och anläggningskonstruktioner.
I projektet, som drivits av Lunds universitets Centrum för Byggrobotik, har Heidelberg Materials Cement varit med som initiativtagare. Även Peab och Swerock har medverkat i arbetet. Projektet har sökt pengar från Smart Built Environment och från SBUF (Svenska Byggbranschens Utvecklingsfond).

Luftmuskler styr slangen
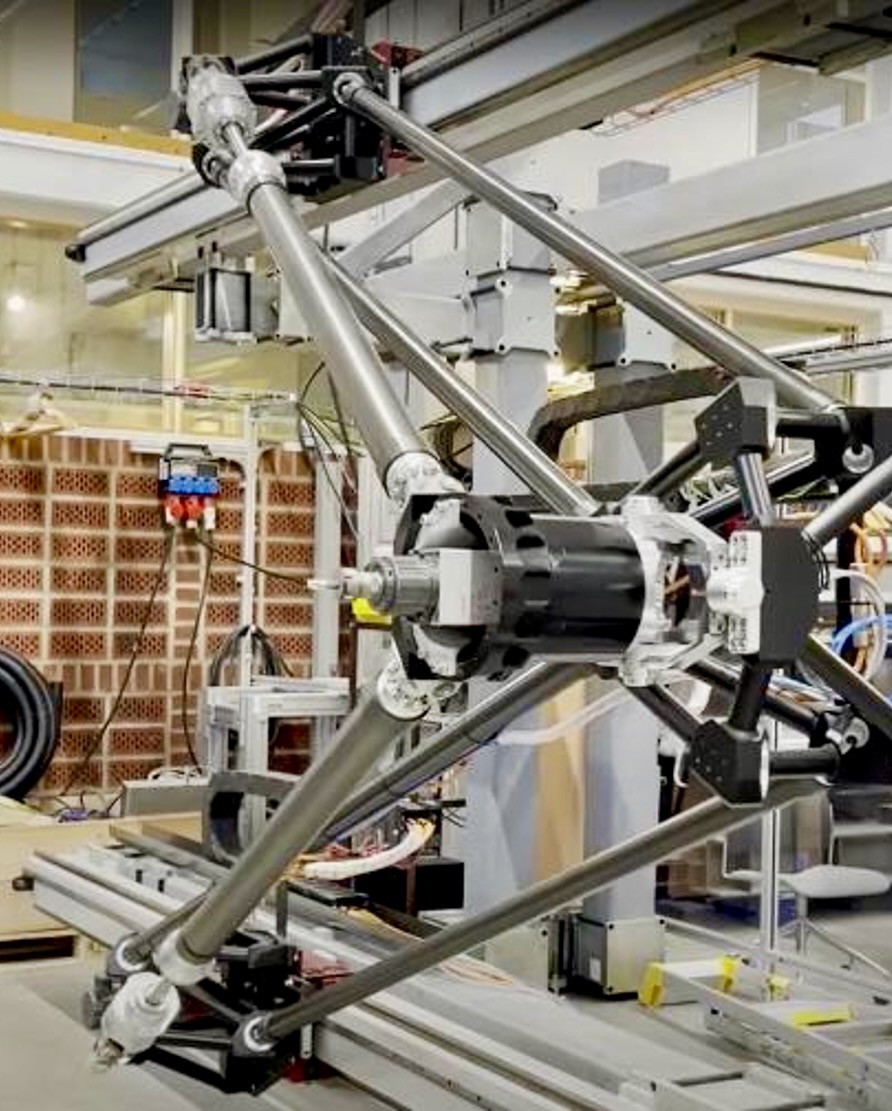
Anordningen är uppbyggd med fyra så kallade luftmuskler (pneumatiska ställdon) som fästs via två 3D-printade kolfiberplattor som i sin tur monteras på en vanlig standardpumpslang. När lufttryck appliceras, drar muskeln ihop sig och blir
kortare. När lufttrycket minskas, expanderar muskeln och återgår till sin ursprungliga längd.
Musklerna finns i olika storlekar, med varierande diameter, längd och dragkraft.
– Genom att kunna styra hur de här luftmusklerna förses och töms på luft kan vi styra pumpslangens rörelse. Det är en PLC-enhet med ventiler som kan reglera flödet av luft och hur det ska flöda in i luftmusklerna. Vi har också kopplat en handkontroll med joystick. På det sättet kan vi fjärrstyra den, säger Robert Larsson.
Vid fältförsöken som genomfördes på Swerocs fabrik i Helsingborg skulle 20 kubikmeter betong pumpas. En av Swerocks rutinerade pumpmaskinister fick agera testpilot och styra pumpslangsroboten.
– Vi tyckte att det gick över förväntan bra med tanke på att det var vårt första test med en prototyp. Vi kunde i princip gjuta allting med hjälp av fjärrstyrning, säger Robert Larsson.
Planen är nu att gå vidare och utveckla prototypen där säkerhetsaspekterna kommer att väga tungt. Man vill exempelvis testa hur roboten kan motstå eventuella luftskott.

Småskaliga robotar på gång
Vid Centrum för Byggrobotik pågår också försök med flexibla småskaliga robotar som skulle kunna göra fler betongrelaterade arbeten.
– Vi har till exempel armering som är ett spännande område som vi gärna skulle vilja titta mer på.
Men också bearbetning av betong, höjdkontroll med mera, säger Robert Larsson.
Tanken är att om man kan utföra relativt enkla saker på ett flexibelt sätt så minskar kostnaden och det blir mer intressant för byggprojekten. Det är också centralt att belysa samarbetet mellan robot och människa samt mellan robot och robot.
– Vi skulle gärna vilja ha en robot som också kunde samarbeta med den pumpslangsroboten så att man får ut betongen, och sedan en robot som kan kontrollera och bearbeta betongen samt kontrollera att det är rätt höjd med mera. Det ligger längre bort men vi vill gärna börja titta på detta nu, säger Robert Larsson.

Robotar ser och lär
Generellt behöver en byggrobot ett antal grundläggande förmågor för att kunna fungera.
Den ska exempelvis ha någon typ av flerledad robotarm som kan utföra en fysisk bearbetning. Den behöver också ha ett verktyg, och kunna plocka saker, samt kunna såga, borra, slipa, bearbeta, och kanske 3D-printa.
Roboten behöver också ha mobilitet för att kunna röra sig runt på en byggarbetsplats. Den ska kunna klara att gå på hinder. Byggplatser är väldigt ostrukturerade och dynamiska med trappor och andra hinder.
Den måste vara utrustad med sensorer, kameror, och kanske laserscanners för att kunna uppfatta sin omgivning och ta in vad det är den ser för att förstå vilka objekt den ska jobba med. Roboten kan ha ben, men också vara försedd med hjul, eller larvfötter. Den kan också vara en drönare.
– Roboten måste kunna identifiera och samarbeta med människor för att kunna jobba säkert. Den måste också ha kapacitet att fatta sina egna beslut utifrån de situationer som uppkommer, säger Robert Larsson.
– Det senaste i forskningen innebär att man inte längre förprogrammerar en robot. I stället får den se hur man utför uppgifter. Sedan lär den sig adaptivt. Det är det mest effektiva sättet att få robotar att funka.

Armeringsrobot nästa steg
Utvecklingen av byggrobotar domineras för närvarande av USA och Kina och de två länderna står tillsammans för ungefär hälften av alla publicerade artiklar. På den årliga konferensen ISARC (International Symposium on Automation and Robotics in Construction) samlas alla världens forskare och företag kring byggrobotik för att diskutera och utbyta idéer. Här presenteras också forskningsfronten inom Byggrobotik.
– Jag deltog på den senaste konferensen i Montreal.
och tittade närmare på de projekt som hade bäring på betong. Där handlar det väldigt mycket om att få robotar att kunna armera konstruktioner, och vad som krävs för det. Det handlar väldigt mycket om datorseende, att kunna identifiera vad roboten ska kunna plocka, om armering, och hur den ska kunna naja, säger Robert Larsson.
– Glättningsrobotar var också ett område som presenterades: Att få dem att upptäcka hinder och att autonomt kunna jobba på och bearbeta ytor. Inte för mycket, inte för lite. Vi fick också stifta bekantskap med en undervattensrobot för inspektion av betongkonstruktioner under vatten. På konferensen presenterades också exoskelett för armerare. Exoskelett är bärbara maskiner som förstärker kroppens rörelser och styrka genom biomekanik, robotteknologi och sensorer.

Vill ha input från branschen
Centrum för Byggrobotiks mål är att få fram robotar som är mer anpassade för byggen. Centrumet har tillgång till olika typer av robotsystem som man i möjligaste mån försöker ta ut i den verkliga miljön för att se hur de fungerar.
– Mycket av det vi ser i dag i forskningen är att man tar vanliga industrirobotar och försöker få ut dem i alla möjliga situationer och det är de inte gjorda för, säger Robert Larsson.
Han uppmanar alla inom bygg- och betongbranschen som är nyfikna och intresserade av byggrobotik att kontakta Centrumet och delta i dess projekt.
– Vi jobbar väldigt hands-on och det är viktigt för oss att inte automatisera eller robotisera bara för att vi kan göra det utan det gäller att hitta rätt saker som är viktiga, säger Robert Larsson.
Anders Carlsson



























































































{kind=link}